
This post is inspired by the recent press release about the Rolls Royce Accel, an experimental electric aircraft being built to attempt the electric speed record. Close friends know I’ve been noodling in this area myself off and on since 2012 but I decided it was time to write a more comprehensive blog, partly in recognition of the growth of my technical audience, and partly because I don’t have any short term plans to resume work in this area.

The usual disclaimers apply: I’m a physicist, pilot, and drone pilot with a variety of bizarre ideas. I am about to write a 5000 word demonstration of my cringe-inducing ignorance on yet another topic, on which I have no formal qualifications. Worse, I know a dozen or so people who know much more about this than I do, and some of them even read this blog. But they haven’t written this blog, and I never let this sort of doubt stop me before, so why stop now? Obviously, all care is being taken with technical detail and I am fortunate to enjoy feedback from some of the best in the biz!
Let’s begin with a quick review of the relevant speed records. Officially 142 types of aircraft have flown supersonic, of which only two (the Concorde and Tu-144) were civilian aircraft. All are propelled by jet engines, often with afterburners.
As of mid 2018, electric records stood at 245 mph for multicopter, 308 mph for electric model plane, and 545 mph for a glider performing dynamic soaring. By comparison, the speed of sound is around 767 mph, so parts of all these aircraft are already in the transsonic regime. In 2017, an electric Extra EA-330LE set a record of 207 mph, which the Rolls-Royce team hopes to extend to 300 mph, and maybe much more.

Electric aircraft are an emerging technology. When I was a kid, radio-controlled aircraft were almost all 2-stroke engine powered balsa wood systems with fairly custom electronics. Today, electric is the norm in RC land, particularly multirotors (quads/drones) which are impractical without electronic speed controllers.
Electric aircraft have certain advantages and disadvantages. Advantages include mechanical simplicity and reliability, reduced noise, reduced cost, increased efficiency, and reduced engine weight. The major disadvantage is that battery energy density is still, at best, about 50 times less than gasoline. Even factoring in other efficiency gains, electric aircraft have greatly reduced flying time and range.
The underlying reason that I believe electric aircraft can break the sound barrier is that electric motors can deliver far higher power-to-weight ratios than piston engines, jets, or turbines. The F-4 Phantom is a textbook example of high thrust, being able to (just) achieve a vertical climb. In contrast, for $100 I can buy a racing drone that can accelerate vertically at 10 gs. There are other factors at play but a power-to-weight ratio of 10 screams possibility.
In terms of fundamental physical limits, let’s consider the Concorde. While most fighter jets can fly supersonic for at most a few minutes, the Concorde couldn’t do in-flight refueling and had to cross the Atlantic in a single hop. It could cruise at Mach 2 for 201 minutes! Let’s say that when battery energy density and electric motor efficiency are factored in, electric systems with present technology would have 10x less range. Still, an electric Concorde could fly for 20 minutes, covering almost 450 miles. That’s more range than a Tesla! Scale it down by a factor of 10 and the square-cube law reduces flight time to 2 minutes, which is easily enough time to accelerate and cover a test course in both directions.
Of course it should be possible to develop a better configuration than a Concorde clone, but it’s an interesting starting point. In particular, many supersonic aircraft use delta wings because of relatively consistent lift characteristics over a range of speeds. It’s not that Concorde needs that enormous wing to fly at Mach 2 at 60,000 feet. Concorde needs the huge, draggy wing to fly slowly enough to land on a runway. But electric aircraft can deliver the necessary power and control to take off and land vertically (VTOL) like a helicopter, obviating the need for much wing at all.
Before diving into the specifics of different subsystems, I will motivate an example point design by appealing to the obvious. A supersonic electric aircraft must have a lot of thrust and minimal drag. When we think about what it might look like, the F-104 Starfighter comes to mind. Long, pointy, and with the barest minimum of a wing.
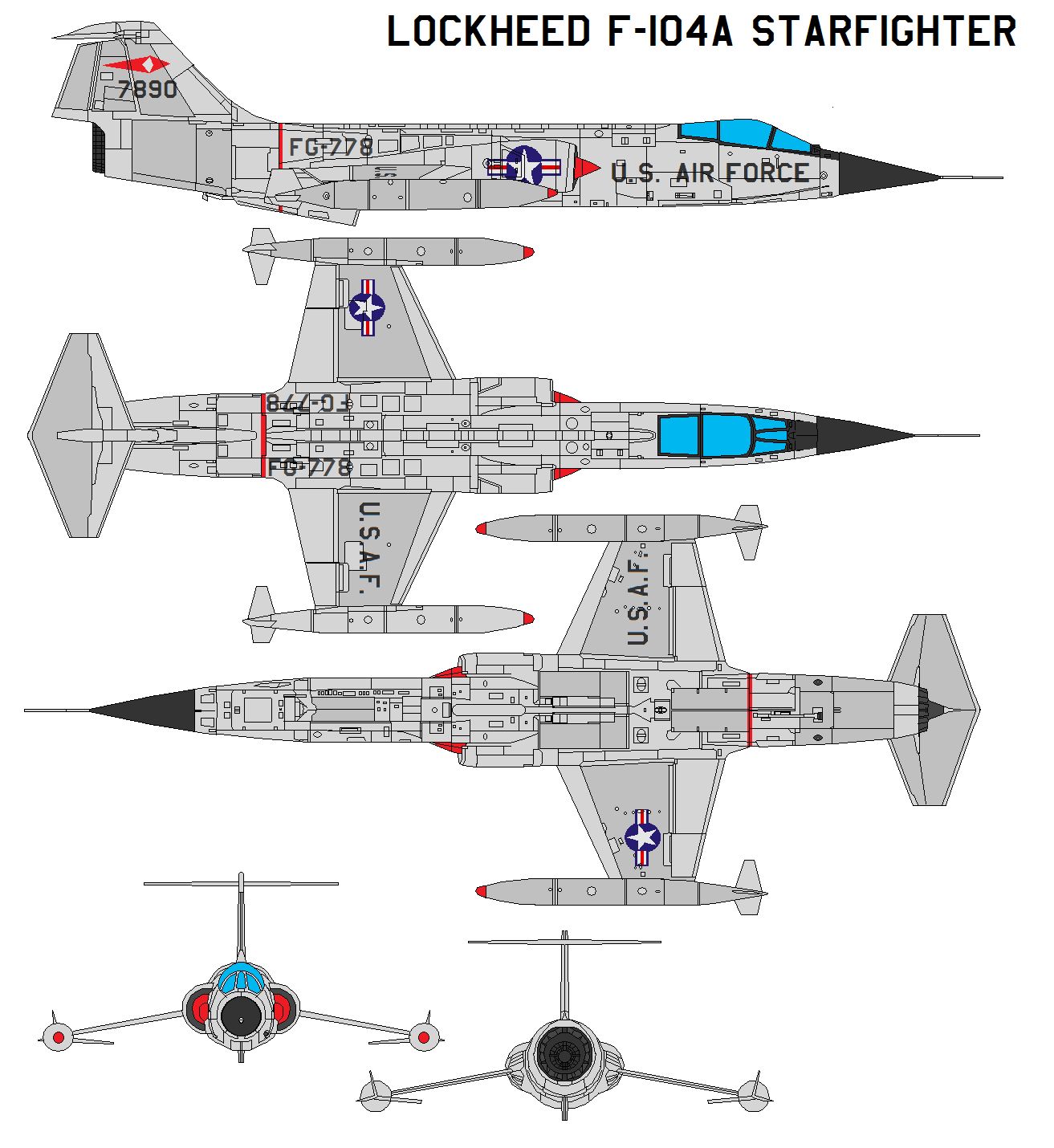
An electric version would do away with the engine intakes (no need for subsonic flow!), double the wing in a cross configuration, rip off the empennage, and replace almost all the internal parts with battery.
Here’s a CAD model for a racing drone scale prototype I failed to complete before starting a family. It’s specced for two 5s 200C batteries in series powering 8 80 A ESCs to 8 2600 kV motors, for a peak power draw of 26 kW(!). With a cross sectional area of 0.007 m^2 and drag coefficient of about 0.1, a typical subsonic propeller mechanical efficiency of 80% would put this through the sound barrier. That’s not a fair assumption for propeller efficiency, however. Regardless of actual performance (I hoped for 300mph) it delivered major pucker factor in bench testing on the kitchen table. Deafening, even in earmuffs.

Propellers seem like a good place to start, followed by power, thermal, aero, structure, controls, and batteries.
Propellers
Ordinarily, fast planes use jet engines for propulsion. Their compressor stages operate at subsonic speed so all supersonic jets have complex intake systems designed to decelerate inrushing air with a series of shocks prior to impacting the turbine. Building a turbine to ingest a supersonic stream ordinarily seems like a recipe for disaster. Jets need subsonic flow because combustion typically occurs subsonically. Electric propellers have no such constraint, and nor do they care that 80% of the atmosphere isn’t oxygen.
The second intuitive misconception worth addressing is whether propellers can be supersonic at all. It turns out that not only do high bypass turbofans’ tips exceed the sound barrier during take off, some high performance single engine aircraft, such as the Beechcraft Bonanza, generates its characteristic takeoff buzz with supersonic flow around the propeller tips shedding shocks.
At a more extreme level, the Tu-95 actually operates with supersonic propellers, accounting for its unusually high cruise speed. Each of 4 16,000 hp turbines drives two counter-rotating 4 bladed propellers. Anecdotally, it can be heard from over the horizon.
It should not be so mysterious that an electric motor driven propeller can exceed the sound barrier, given that a propeller is little more than a rotating airfoil, with pitch and foil tuned for apparent wind velocity. While the Tu-95 itself is subsonic and so flow over the propeller hub is subsonic, there is no ipso facto reason that a twisted supersonic propeller foil couldn’t operate entirely in the supersonic regime. In many ways, doing so greatly simplifies the aerodynamic design!

A good subsonic airfoil can generate a lift-to-drag ratio (L/D) of 30 or 40, but a propeller’s mechanical efficiency in converting torque to thrust is limited instead by the apparent wind direction. Even if the propeller rotates 10x faster than the airplane cruises, that 10:1 rotation of the L/D vector limits efficiency to about 85%.
A supersonic propeller would be lucky to get half of that. First, the Küchemann relation specifies that the supersonic L/D goes roughly as 4(M+3)/M, where M is the Mach number. Worse, mechanical limitations due to centrifugal force discourage high angular velocities. For a prop tip speed of Mach 3, the Küchemann relation gives a L/D of 8. But if the cruise speed is only Mach 1.2, then the effective prop efficiency is 63%, and that’s at the most efficient part of the blade. I think it’s safe to assume that the prop efficiency would be about 30%, possibly increasing to 45% given a lot of engineering blood, sweat and tears. Because the foils would be operating stalled during subsonic phases of flight, efficiency would not improve at lower speeds.
Let’s consider a 3 m diameter propeller, consistent with the F-104 scale aircraft. The acceleration felt at the tip is 660,000 m/s^2, or 66,000 gs. If made from carbon fiber with a linear taper, peak tensile stress is about 400 MPa, much less than the 3.5 GPa ultimate tensile strength of this material. A quadratic/conical taper would have peak tensile stress of 25 MPa, well within the capabilities of steel. Tolerance to twisting and vibration are also concerns that factor into material choice. The tensile stress demands don’t change with scale, so there’s no penalty or advantage to mechanically testing supersonic props at subscale.
Fan or prop? Propeller disk fill fraction depends on thrust density requirement, which ultimately drives motor sizing. The F-104 required 44 kN to reach the sound barrier. Each blade generates about 0.5*rho*Cd*A*v^2*(L/D) = 0.5*1.3*0.1*1*0.01*1000^2*1.6 = 1 kN of thrust. With 2 motors on each of 4 wings, 6 blades are required per motor to exceed this level of thrust.
Power
Let’s look at the system power demands during supersonic cruise. At Mach 1.2, 44 kN of thrust requires 18 MW of mechanical power. Given a propeller efficiency of 30%, 60 MW of electrical power are required, notionally split between 8 motors drawing about 8 MW each. That’s a very big motor.
VTOL power demands are a bit different. With a maximum take off weight of 13166 kg, a vertical hover requires 129 kN of thrust. From basic rotary wing theory, we get a required mechanical power of 5.4 MW, or 18 MW electrical at 30% (subsonic, stalled) prop efficiency. This is a factor of 3 less than cruise power, suggesting that rapid acceleration is possible at launch.
With the best permanent magnet aircraft motors achieving a power-to-weight ratio of about 12 kW/kg, each motor weighs about 650 kg, though I believe 400 kg is achievable following the advances of Tesla’s permanent magnet synchronous reluctance motor.
Thermal
How badly will this thing melt? If the motors are 99% efficient then at cruise power, each will be generating 80 kW of heat. This is roughly equivalent to the heat output of a 50 horsepower piston engine so, I believe, could be managed with air cooling alone. Switch gear, battery connects, and propeller tips will also get warm but not beyond the limits of known material science.
Aero
Like all supersonic aircraft, the F-104 aerodynamic design obeys the area rule. That is, the transverse cross sectional area of the plane must vary smoothly from nose to tail to prevent the formation of intermediate shocks. The propellers themselves must also follow the area rule, using a double delta shape that also helps the mechanical taper.
In cruise, the aircraft generates 44 kN of drag and 129 kN of weight. With a Küchemann L/D of 14, only 9 kN of lift-induced drag is required to maintain level flight, with the remaining 35 kN being parasitic. In other words, this point design follows in the F-4’s “triumph of thrust over aerodynamics” footsteps. If in doubt, reduce wing area. The wing is not needed for control authority and the fuselage alone can easily generate enough lift.
Structure
The propellers generate substantial torque, which ideally is reacted out locally by counter rotating props at each end of the wing tip thrust pod, or even on the same motor. Much of the rest of the mass budget is consumed by batteries, so the structure should be kept as efficient as possible.
Controls
Unlike a traditional airplane, electric supersonic aircraft in the given configuration will require active controls to steer and, at low speed, maintain stability. I think it makes sense to perform aero design that places the center of drag behind the center of mass, even if the design is otherwise symmetrical. High speed stability reduces the power margin needed for the control band. This is why my prototype has fins, which also function as tail sitting landing gear.
For subscale uncrewed demonstrators, maintaining line of sight may prove to be difficult. Commercial off the shelf GPS and inertial guidance systems are designed to not work at very high speeds (guess why…) so some amount of technical attention is warranted here. In the simplest case, an unguided passively stable model could perform a vertical climb and parachute recovery.
Batteries
Saving the best for last. What do the batteries look like for this thing? With a take off weight of 13166 kg (same as the F-104 for our point design) and a battery mass fraction of 60%, 7900 kg of high performance lithium ion batteries (265 Wh/kg) can deliver 2.1 MWh of electricity. At a 60 MW power draw, the batteries will last 126 seconds, requiring at least 30C of discharge capacity.
A test flight profile may look like this:
– Hover, accelerate at 2gs for 20 seconds into horizontal flight at 400 m/s.
– Cruise for 90 seconds, covering 36 km (22 miles).
– Regeneratively decelerate at 1.5 gs for 30 s.
– Transition to vertical hover and land, taking 10 s.
Total flight time: 150 s (2.5 minutes). Total distance: 47 km.
Yes, it would be very noisy.
Path to being useful for something
All the above analysis has assumed a test article in level flight. Improving propeller efficiency from 30% to 45%, scaling up by a factor of 10, and having batteries with 500 Wh/kg could see flight times of 40 minutes at Mach 1.5, and a total range of about 1200 km. While batteries today remain underwhelming for flight applications, they improve steadily by about 5% a year and will likely continue to do so. The time to develop the remaining flight hardware, therefore, is now. By the time a commercializable supersonic (or subsonic) electric airframe is ready, the batteries will have caught up.
But there’s no reason to confine ourselves to level flight. Electric propulsion doesn’t depend on combustion, so in principle one can increase speed with altitude, provided the dynamic pressure and mass flux on the flight surfaces remains roughly constant. In practice high drag down low and exponentially decreasing density up high means that the sweet spot is between 50k and 80k feet. To hit Mach 5 in a vertical climb by 100k feet requires a constant acceleration of 4 gs, so passenger comfort may demand an oblique flight profile. After 40 seconds (vertical) or 80 seconds (2 g oblique) the aircraft is on a parabolic ballistic trajectory that will take it to the edge of space and back in 4 minutes, enabling a 500 km hop in just 6 minutes, including deceleration and landing. This is possibly the most absurd way of getting from Los Angeles to San Francisco.

Cool , mind blown. Plenty to digest.
LikeLike
I wonder if it would help to have a 3 stage system.
1. Have a drone take off carrying the aircraft, get to altitude and carry as far as it can, then
2. Have the the aircraft go as far on its onboard power as it can with some safety margin, then
3. Rendezvous with a final drone which to carry the aircraft to its destination.
The two drones could be optimized for VTOL, whereas the middle stage would be optimized for horizontal flight.
LikeLike
good idea!
But stopping the supersonic plane as it arrives at the third stage and docks with it may still require VTOL on the main supersonic cruise stage
LikeLike
How difficult would it be to create an autonomous charging drone aircraft?
Once the client craft once it had turned into its ascent bearing, the drone would couple with a cable to pole system and provide power all the way up to cruise altitude.
Other models would be capable of sustained in-flight recharging.
Consisting mostly of battery, it would be very dense. It would fly below the wash of the client craft and match its movements perfectly. This would be accomplished with vectored thrusters, compressed air vents and control surfaces at both ends of the craft.
It would be a huge technical challenge. But the economic and environmental benefits would be vast. Longer ranges and/or heavier cargo capacity. Lower cost of energy and maintenance would accelerate the demise of kerosene aviation.
LikeLike
(For the ballistic LA to San Francisco hop, a physically coupled booster would probably make more sense.)
LikeLike
I know of a few tech demos but I think it’s unlikely to work at the power levels required here.
LikeLiked by 1 person
You might want to reality-check your last two conclusions.
For the first, using your previous value of a 60% battery mass fraction, I get a required L/D of about 24 which is obviously not realistic at supersonic speeds.
For the second, the combined specific potential and kinetic energy at mach 5 and 100k feet is 350 Wh/kg. It would therefore not even be physically possible unless you have a battery mass fraction of at least 70% and no other losses whatsoever.
LikeLike
I was intentionally vague about battery energy density towards the end. Good catch!
LikeLike
On Teslas battery day, one of their big talking points were how the new 4680 cells featured 40% longer range compared to their current cell design. They didn’t specify exactly what they meant by “40% longer range” but I think it make sense that it’s due to a 40% increase in specific energy. A vehicle of the same weight but with 40% more energy can travel a 40% longer distance, all else being equal.
So battery cells with specific energy of ~370 wh/kg might be commercialy ready in the very near future!
Thanks for writing this blog btw, it’s so much fun to read!
/Aerospace engineering student 🙂
LikeLike
Fantastic thinking…….please stay unconventional for this gives the greatest chance of making this difficult challenge possible……keep going you will find a way.
LikeLike
its so amazing to see such revolution in technology!
LikeLike
This is indeed the most absurd way to get from LA to SF. Let me double down by suggesting a longer range flight made by repeated hops as per the described trajectory. I would definitely engage in some amount of frivolous air travel by such a method if I could afford to do so.
LikeLike
I love the idea of ballistic transport. Electric aviation can allow us to go beyond the old air breathing thermal engine paradigm of cruising at constant altitude.
LikeLike
Great article! I got some questions:
– Wouldn’t a subsonic prop in a duct be more efficient than a supersonic prop?
– Wouldn’t a bigger wing have a better L/D (just cruise higher)?
– Does ballistic fly further than “normal”? If so, why?
– What would be the minimal structural mass? 15%?
I think the two sweetspots for electric are Mach 0.7 & 1.5 at 4500 km & 900 km of range. Am I right?
LikeLike
Yes, but only in a particular flight regime.
Not necessarily.
Yes, lower drag.
15% sounds about right.
No idea sorry.
LikeLike
Alright, thanks 🙂
Btw interesting solar + air + hydrogen approach. Are you really serious about going the low efficiency way?
LikeLike
Yes, it’s the only way.
LikeLike
Thanks for the quick response!
I used the Breguet range equation at a L/D of over 50 (sailplane), battery mass fraction of 70 % (15% payload & structure each, Amprius cell) and 75 % total efficiency. Would be transoceanic electric today at up to M0.7, I believe. Email me if you want to exchange some thoughts
LikeLike
I’m not working on this anymore but @robotbeat on Twitter loves this sort of stuff.
LikeLike
I think deep geothermal can be a bigger energy source if you figure out drilling. Despite solar growth
LikeLike